一条斑马鱼幼鱼在水中悠闲游动,忽然,一个柔软的抓手轻轻合拢,将它稳稳握住。片刻后,随着超声波停止,抓手松开,幼鱼毫发无伤地游走——这不是科幻电影,而是苏黎世联邦理工学院研究人员开发的声控人工肌肉的真实演示。
一百多年前,清末科学家徐寿在《Nature》发表声学论文,纠正了伯努利定律的错误,成为中国科学家在那本期刊上的首次亮相。一百多年后,两位中国青年学者施展和张志远作为共同第一作者,再次于《Nature》发表声学领域突破性研究,推出了一种革命性的声控人工肌肉。
微气泡的力量:声波如何驱动肌肉
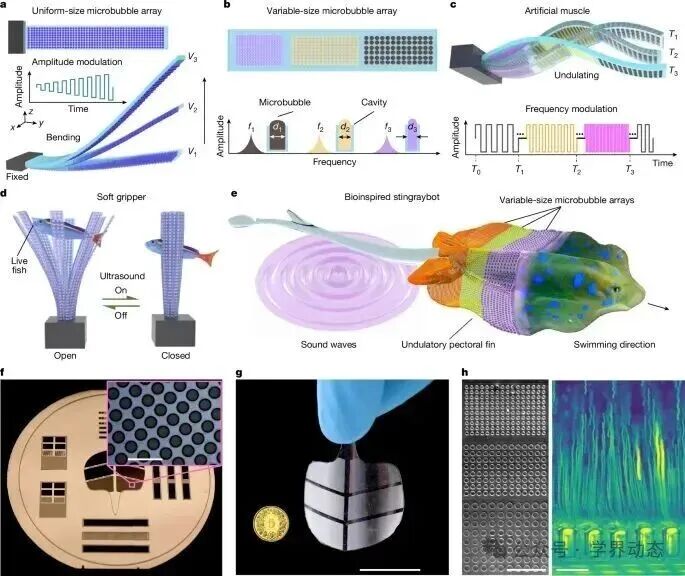
这项研究的核心创新在于使用了超过10,000个精密设计的微气泡。当这些微气泡被捕获在硅胶薄膜的微孔中并受到超声波刺激时,会产生振荡,从而推动人工肌肉运动。
这些微气泡的直径约为100微米,相当于人类头发的宽度。研究团队通过精确控制微气泡的尺寸和排列,使它们能够对特定频率的超声波做出响应。
“当受到扫频超声波激励时,微气泡阵列发生选择性振荡,产生分布式点推力,从而使肌肉实现可编程变形。”研究人员在论文中描述道。
这种设计使人工肌肉具有多项卓越特性:高紧凑性(约3,000个气泡/mm²)、轻量化(0.047 mg mm⁻²)、高力强度(约7.6 µN mm⁻²)和快速响应(抓取过程中低于100毫秒)。
从抓取到游泳:多场景应用展示
研究团队设计了多个演示案例,展示这种人工肌肉的多功能性:
温和的软抓手:由6至10条均匀气泡阵列肌肉组成的小型软抓手,每条触手含10,000–20,000个气泡。在超声刺激下,触手能在100毫秒内抓取斑马鱼幼体,停止刺激后幼体可自由游动。
“当看到这条只有几毫米长的仔鱼在你面前被稳稳抓住,然后又不给它带来任何伤害,以至于它能轻松地游走,这个场景是令人兴奋的!”张志远分享道。
自适应机器人皮肤:这种超薄的人工肌肉可以贴合到任意表面,如杏仁或草叶,赋予静态物体运动能力。一片普通的茶叶在装上这种机器人皮肤后,竟然能在超声波作用下弯曲摆动。
仿生黄貂鱼机器人:研究人员开发了名为“Stingraybot”的微型机器人,其两侧仿生胸鳍集成了变尺寸气泡阵列。在扫频超声激励下,胸鳍产生波动运动,模仿真实黄貂鱼推进,速度约达0.8体长/秒。
生物医学应用的突破性前景
这种声控人工肌肉在生物医学领域展现出巨大潜力:
心脏贴片:研究人员将均匀气泡阵列肌肉贴附在离体猪心外膜表面,在96 kHz和60 Vpp下保持功能粘附超过60分钟。这种技术有望支持未来心脏治疗和临床干预,如抗纤维化药物递送或基因治疗。
靶向药物递送:将人工肌肉预封装在可生物降解胶囊中,注入离体猪膀胱后,胶囊在3–5分钟内溶解,暴露出的驱动器在超声作用下变形并贴附于膀胱内壁。
胃肠道导航:线性人工肌肉被预折叠为轮状结构,在扫频超声波作用下能沿胃和肠道复杂黏膜表面定向滚动,展示了在胃肠道内软机器人干预与靶向递送的潜力。
中国青年的科研之旅
共同第一作者张志远和施展在这项研究中发挥了关键作用。张志远具有多年软体机器人研究背景,而施展则专精于声学领域。
研究初期,团队面临巨大挑战——如何将超声波与软体机器人有效结合。张志远回忆道:“超声波如何驱动一个软体机器人?把气泡扩展到不同的尺度之上会怎样?”
他们通过微纳加工和光刻技术实现了微气泡阵列的高精度制造,并引入旋涂技术制作出极薄的人工肌肉。这些技术突破为后续的应用演示奠定了基础。
未来展望:从实验室到真实世界
这项技术的独特优势在于与现有临床超声设备的兼容性。相比其他驱动方式,这种声控人工肌肉无需额外搭建专用设备,可以直接与医院常用的超声波探头配合使用。
此外,微气泡既可以作为驱动单元,也可以作为成像单元,因为它们具有明显的声学对比效果,便于通过B超等设备进行跟踪观察。
展望未来,施展计划基于离体生物实验,开展基于活体的生物实验,并通过产业研的结合让成果实现落地,最终做成人体可用的医疗装备和手术器件。
这项研究标志着我们在无线、精准控制软体机器人方面迈出了重要一步。从微创手术到靶向药物治疗,从可穿戴设备到工业操纵,这种声控人工肌肉技术正悄然开启一个全新的软体机器人时代。
正如科学家们所展望的,这种可定制化人工肌肉有望对软机器人、可穿戴技术、触觉反馈和生物医学仪器领域产生深远影响。而其中中国青年的贡献,正在书写科学传承的新篇章。